LiveBaster - самодостаточный искусственный интеллект |
|
to English Продукт Видео Возможные применения Купить Документация Программные интерфейсы Использование в Unity3D Примеры Контакты 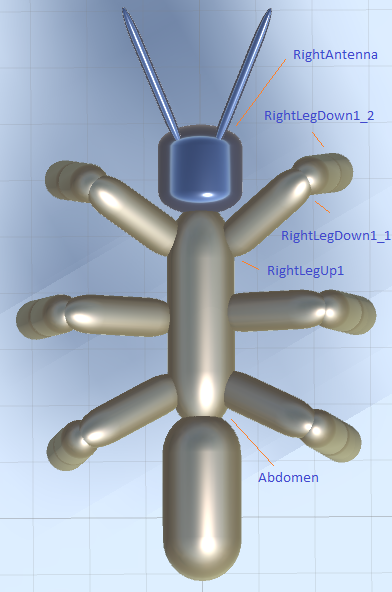
|
Способ подключения и предварительного обучения БК для простых задачКак достаточно частый вариант использования ИИС, можно применить БК для управления движениями робота, причём нет различия, каким именно. Это может быть шагающий, летающий, ползающий и использующий любой другой вид перемещения робот. Для предварительной настройки ИИС и получения опыта возможно подключить БК в различных имитационных пакетах, например Unity3D. При этом можно предполагаемое устройство создать в примитивном виде, главное, чтобы количество датчиков и управляемых приводов (суставов) соответствовало существующему роботу, также нужно задать силу тяжести примерно соответствующую таковой для настоящего робота. Важно также предусмотреть ограничения в движении суставов, соответствующие имитируемому устройству. Если этого не сделать, то обучение может в значительной степени не соответствовать управлению исходным роботом. В качестве сигналов для БК используются десятичные числа, если в настоящем роботе сигналы передаются через стандартную шину (Modbus, Profibus или подобную), то наверняка будет нужен перекодировщик, так как сигналы будут скорее всего в двоичном коде. После этого установить роботу простую задачу (достигнуть нужного пункта или, например, нужного положения корпуса) – и запустить процесс, робот начнёт двигаться, пытаясь выполнить задачу – и одновременно будет происходить процесс обучения. Вначале (возможно достаточно долго) движения будут бессмысленными, постепенно он всё быстрее будет выполнять поставленные задачи. Обращаем внимание, что удачно сконструированный робот (оптимальное расположение конечностей или крыльев, устойчивость равновесия и т.п.) обучается значительно быстрее, чем неудачная или неустойчивая конструкция. После этого можно полученную базу знаний перенести для обучения реального робота. Нужно при этом обязательно убедиться, что в реальном роботе сигналы имеют такое же значение, такой же знак и величину, что и в эмуляции, только в этом случае от такой базы знаний будет польза. Такой способ обучения желателен, так как он значительно экономит время на обучение, существенно снижает затраты ресурсов для робота (энергия, время), снижает его износ в процессе обучения (может быть значительным).Способ подключения БК для сложных задачСложной можно считать задачу, где функции различных сегментов робота значительно различаются. Например, техническое зрение и движение, одновременное перемещение нескольких роботов – футболистов (или «облака» роботов), работа подъёмного крана на шасси (движение шасси и движение крана практически не связано). Фактически тут выбор из двух вариантов – либо один БК управляет всей системой, либо каждой выделенной (по желанию конструктора робота) системой управляет отдельный БК, а также запускается центральный БК (вместо него можно использовать любой вариант обычного ИИ, в некоторых случаях это даже предпочтительнее), который управляет всей системой из нескольких БК. Тут нет однозначного решения, выбор делает конструктор робота исходя из своего опыта и целей создаваемой конструкции. Что касается технического зрения, то для него выпускается ИИС-З-1.00, поэтому техническое зрение будет всегда в виде отдельного БК. При выборе схемы для остальных случаев, можно просто проанализировать достоинства и недостатки каждой схемы подключения БК. Нужно учесть, что ИИС устроен таким образом, что для него нет различия, где, как и в какой последовательности расположены датчики сигналов и исполнительные устройства. Получаемый информационный сигнал никак не связан с местоположением датчика, соседние по нумерации управляющие сигналы могут направляться на разные конечности одного робота, а также и вообще на разные узлы в разных роботах. Нет необходимости прописывать, какие сигналы откуда и куда идут. Вся эта информация определяется ИИС в процессе обучения, причём в процессе работы можно переключить линии – это только приведёт к быстрому (как правило) переобучению ИИС «на ходу». Тут можно провести аналогию со зрением – грудной ребёнок видит перевёрнутое изображение, но довольно быстро мозг его «переворачивает» - и мы в итоге видим правильную картинку. Но если одеть и постоянно носить переворачивающие очки, то довольно быстро картинка снова перевернётся. Именно по такому принципу обрабатывает входящие сигналы от датчиков ИИС. Исходя из сказанного, разделение сигналов датчиков и управляющих сигналов на группы, управляемые каждая отдельным ИИС, происходит в рамках выделения отдельных функциональных групп. Критерием правильности выбора функциональных групп служит скорость обучения робота, если группы выбраны оптимально – то обучение происходит заметно быстрее; но это совершенно не значит, что нельзя выбрать функциональные группы другим образом. В качестве примера – создаётся робот – экскаватор. Для него имеет смысл использовать для обработки изображения (и выделения объектов) ИИС-З, для движения шасси – второй ИИС и для работы ковша – третий ИИС. В этом случае для общего управления конструкцией лучше всего использовать ИИ, который будет ставить задачи функциональным группам, управляемым ИИС и получать от них сигналы.Способ управленияСпособ управления ИИС существенно отличается от обычного для систем с искусственным интеллектом. Это связано с тем, что обычно создаются системы, управляемые ИИ для определенных целей и по сути такой ИИ представляет собой очень сложную и очень умную обратную связь. Как известно, цели для достижения в системе с обратной связью задаются извне. В отличие от этого ИИС – это аналог живого существа и сам определяет свои цели. Поэтому можно реализовать два способа управления. Один из них по сути можно назвать дрессировкой и мало отличается от дрессировки животных (естественно с учетом специфики предмета дрессировки). Но для этого созданный робот должен пройти определенный этап развития. На ранних этапах (только что созданный робот) единственная возможность – создания аналога врожденного рефлекса. То есть роботу закладывается «врожденное» желание что-либо сделать. По мере достижения цели желание можно заменить. |